Prototype Video
This is an early video of a 2D drawing robot I built with a friend for the Fall 2014 Boilermake Hackathon. The red LEDs signify which of the four coils in each stepper motor is energized.
This is an early video of a 2D drawing robot I built with a friend for the Fall 2014 Boilermake Hackathon. The red LEDs signify which of the four coils in each stepper motor is energized.
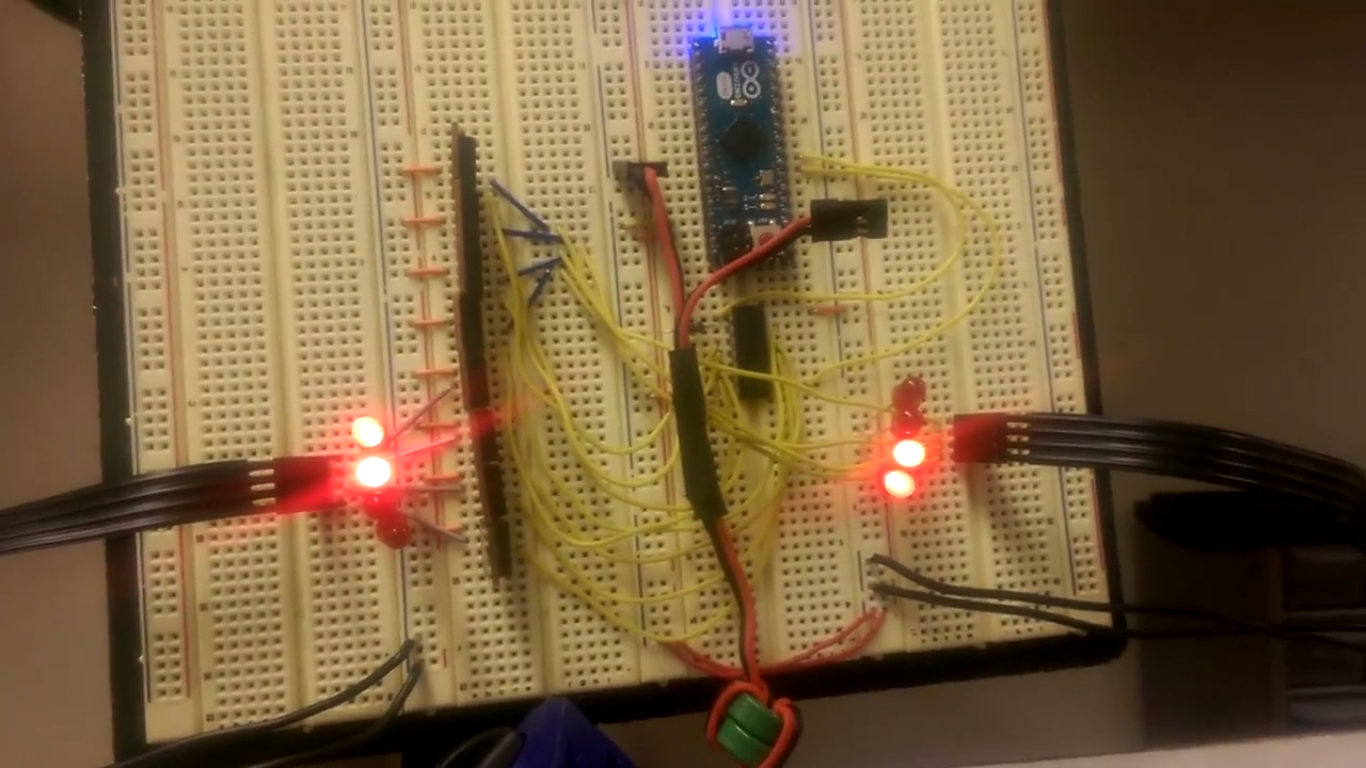
The control circuitry utilizes an Arduino microcontroller running custom stepper motor control software as well as the software that controls the overall movement of the machine. The rest of the circuitry consists of a discrete shift register IC that acts as a sort of a decoder, with each of its outputs connected to the separate coils in each stepper motor. The microcontroller is able to clock in the desired digital sequence representing the combination of on and off coils, and this digital signal is amplified by 8 high-power MOSFETs in order to satisfy the current requirements of the motors.