Competition
This is a video of our run in the Tennessee State Science Olympiad competition, in which we won first place for the robot arm event.
This is a video of our run in the Tennessee State Science Olympiad competition, in which we won first place for the robot arm event.
Most of the robot is made of Lexan polycarbonate sheet because it easily cut and bent. In order to make intricate cuts, a coping saw with a thin wire blade was used. Long cuts which do not have to be perfect, such as those for the arms, were made with a small circular saw blade attached to the dremel and then smoothed out with a metal file. The Lexan was easily bent by heating it with a lighter or torch.
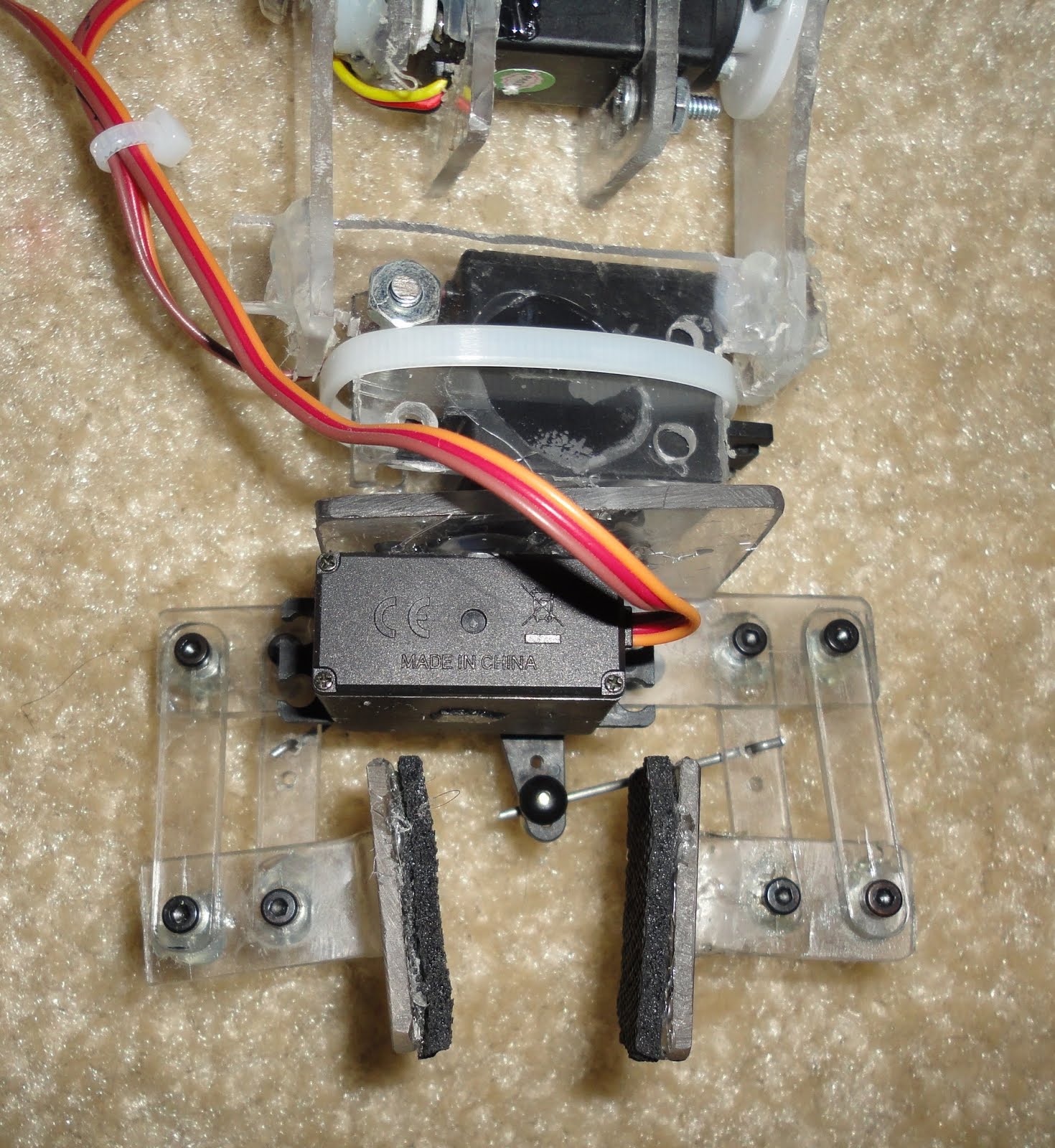
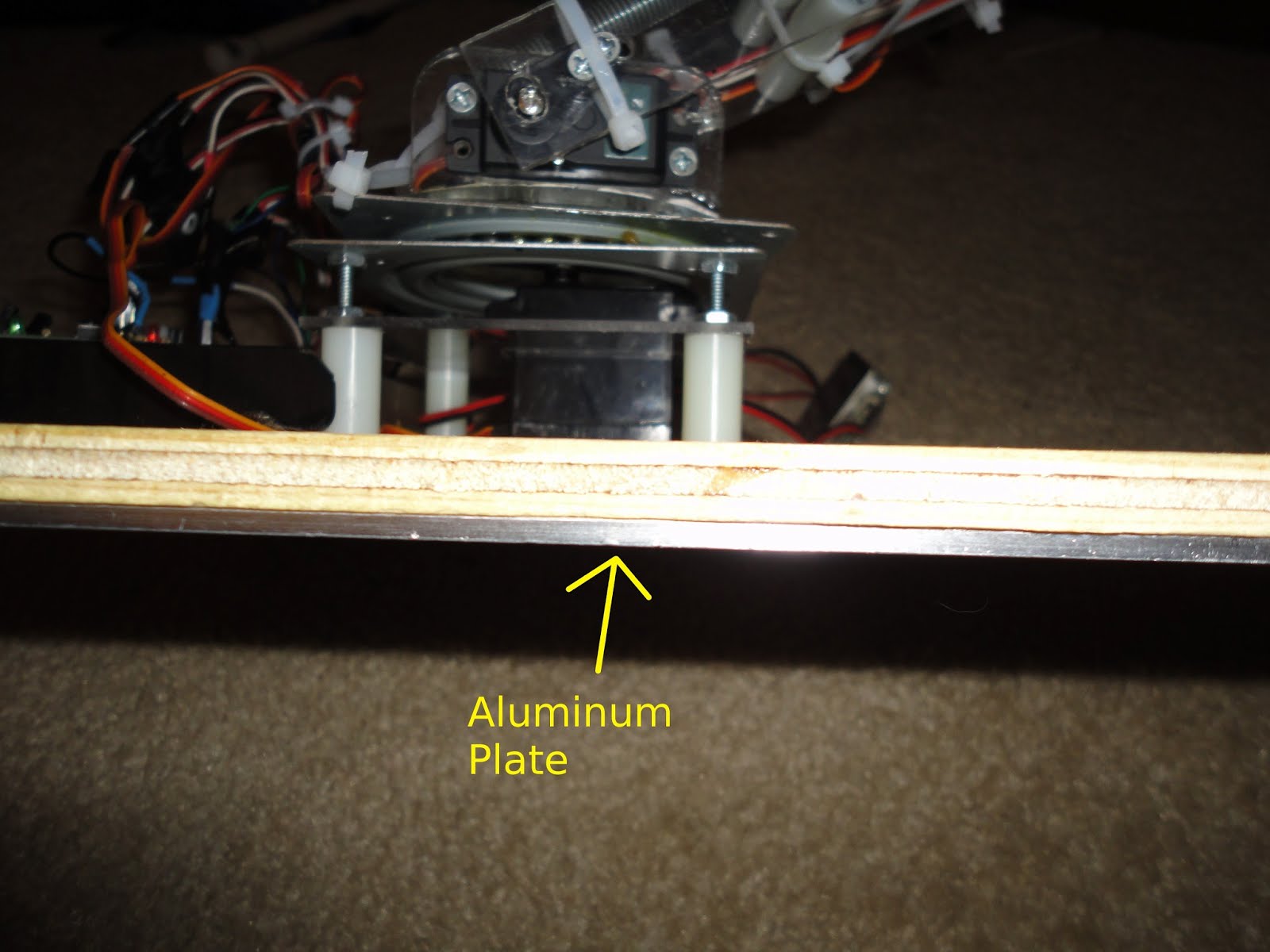
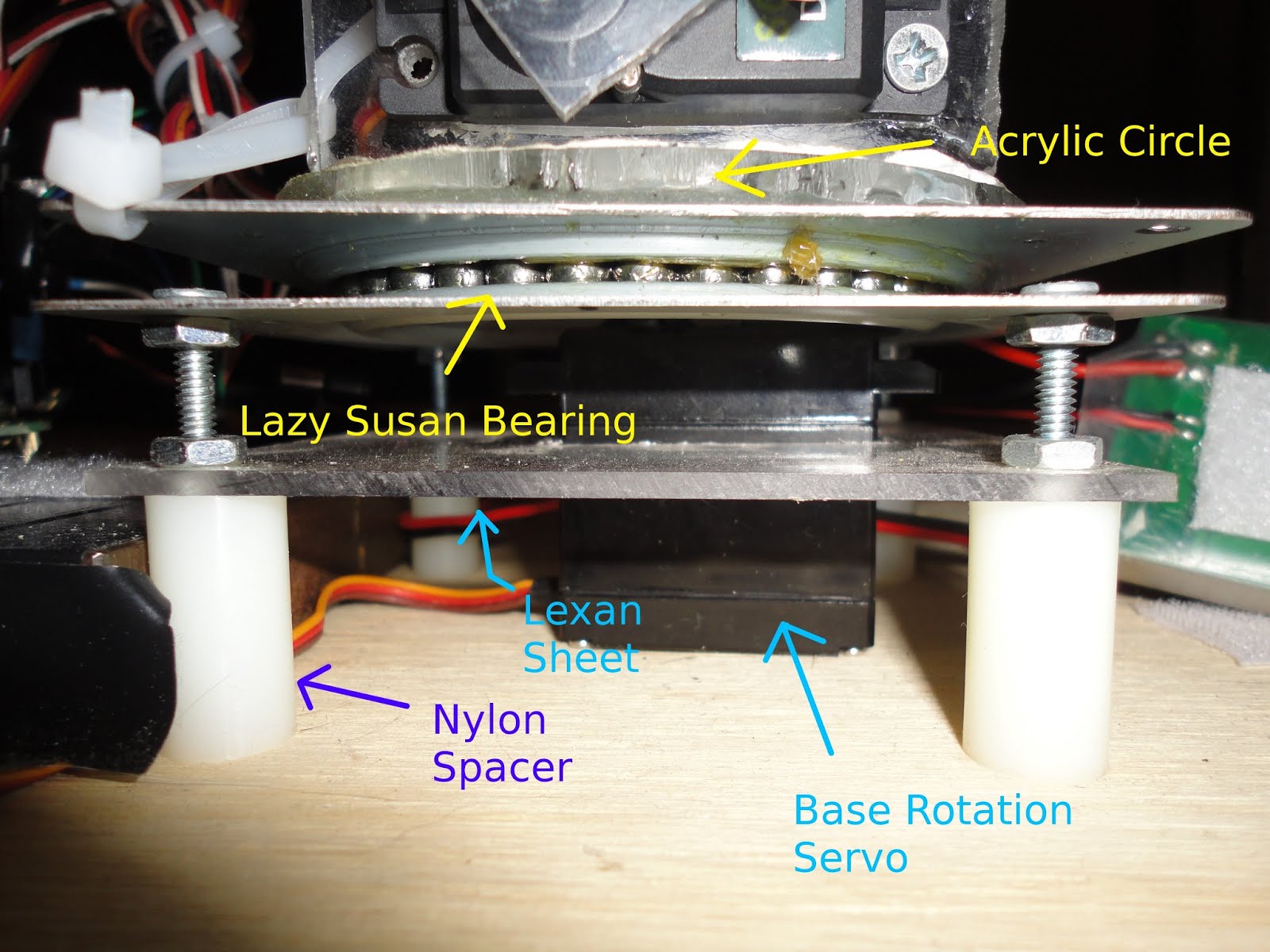
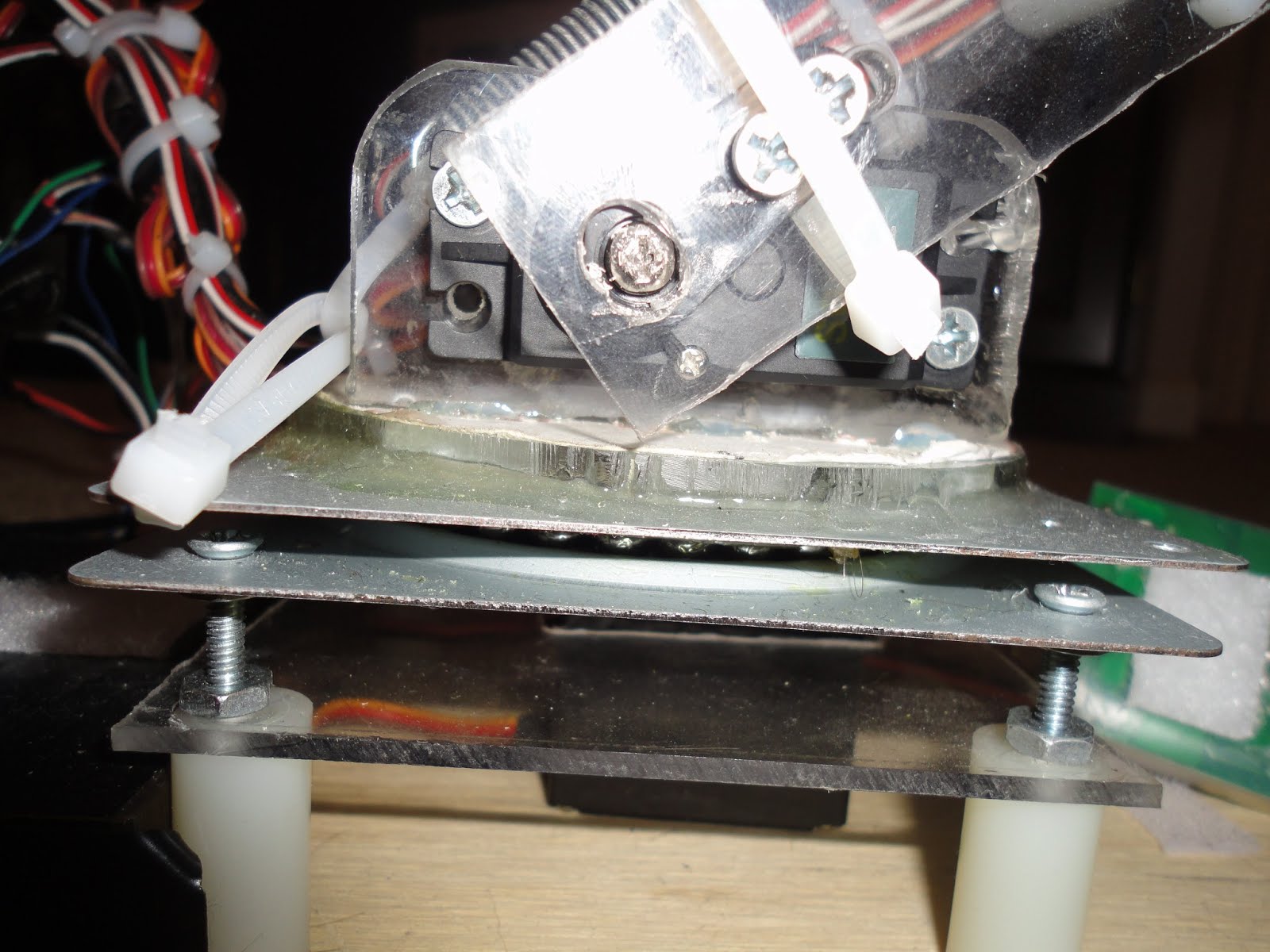
The base was constructed of a 29x29 cm aluminum sheet screwed to a piece of plywood of the same size. A solid iron block was placed on the back of the base to add more weight. In the middle of the base, a lazy susan bearing was screwed to the base with four machine screws. The screws go through nylon spacers in order to elevate the bearing to make room for the base rotation servo, which is kept stationary with a piece of polycarbonate with a servo sized hole. The rotating part of the base consists of a circular piece of acrylic glued to a 4" lazy susan bearing. Vertical pieces of acrylic were inserted and glued into holes in the circular acrylic, and holes in these pieces hold the base joint servos.
The base rotation servo was originally a standard 180 degree rotation servo modified for 360 degree rotation by disconnecting the internal potentiometer. This servo was replaced with a servo with over a 360 degree range of motion.

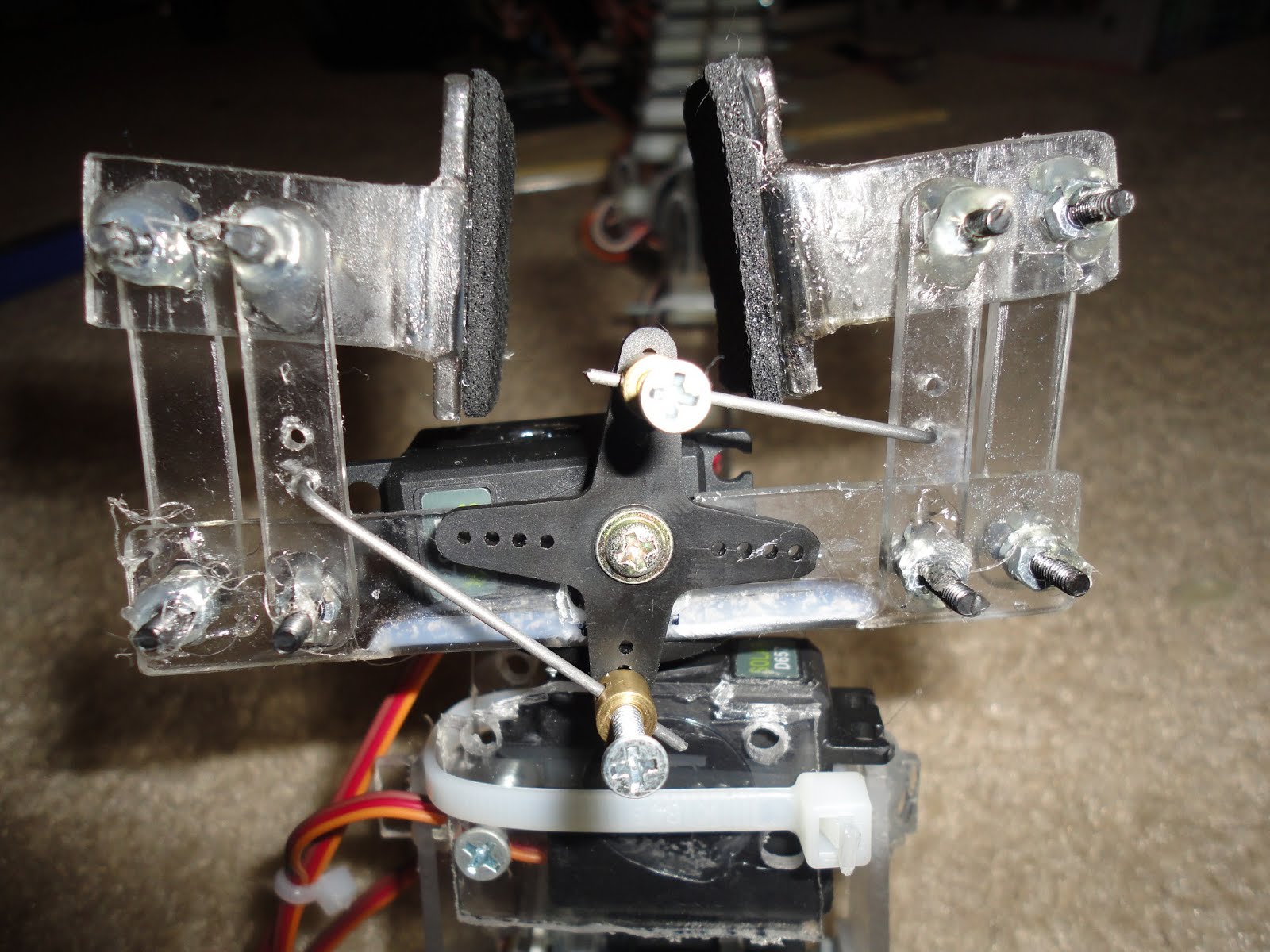
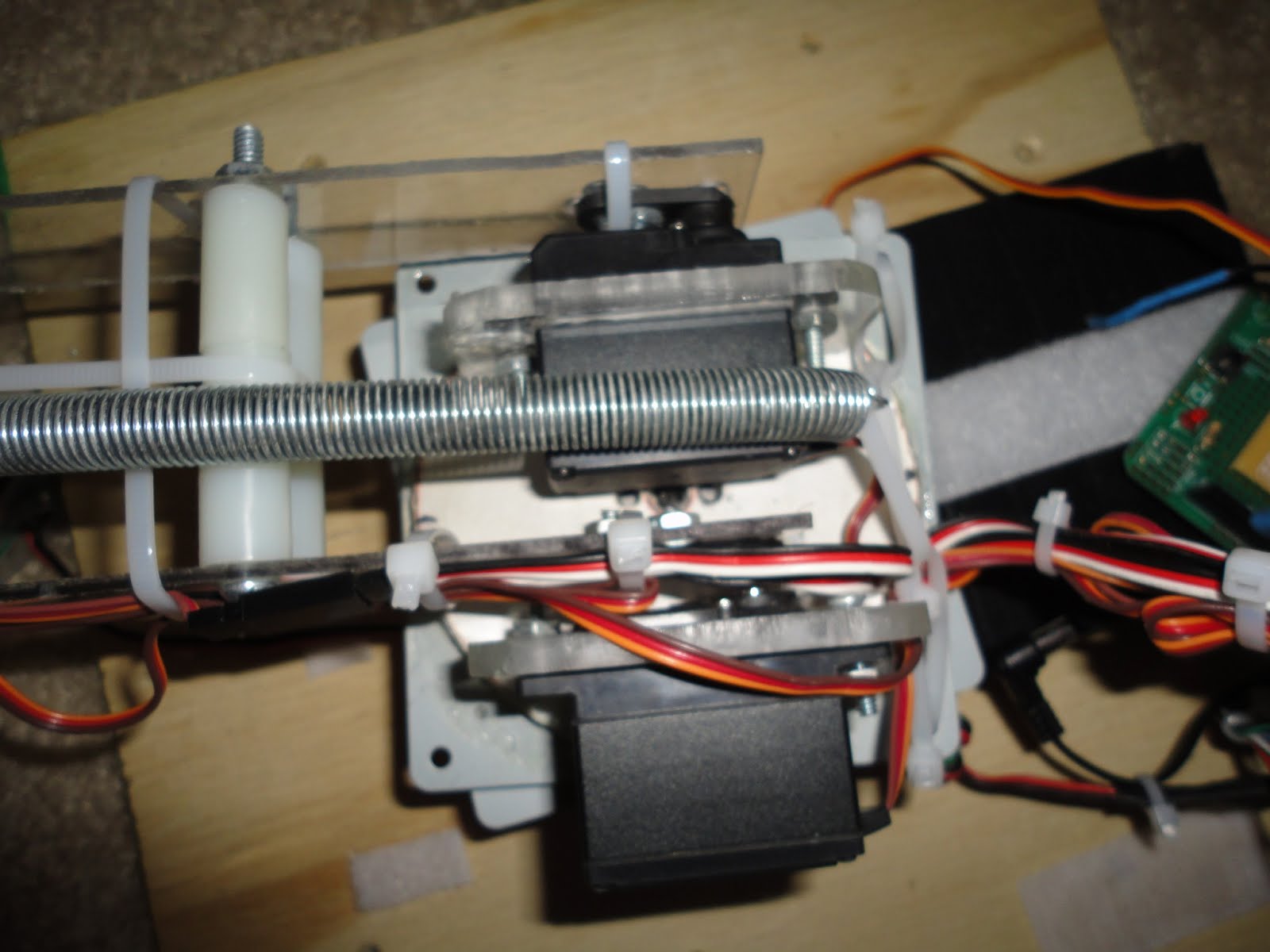
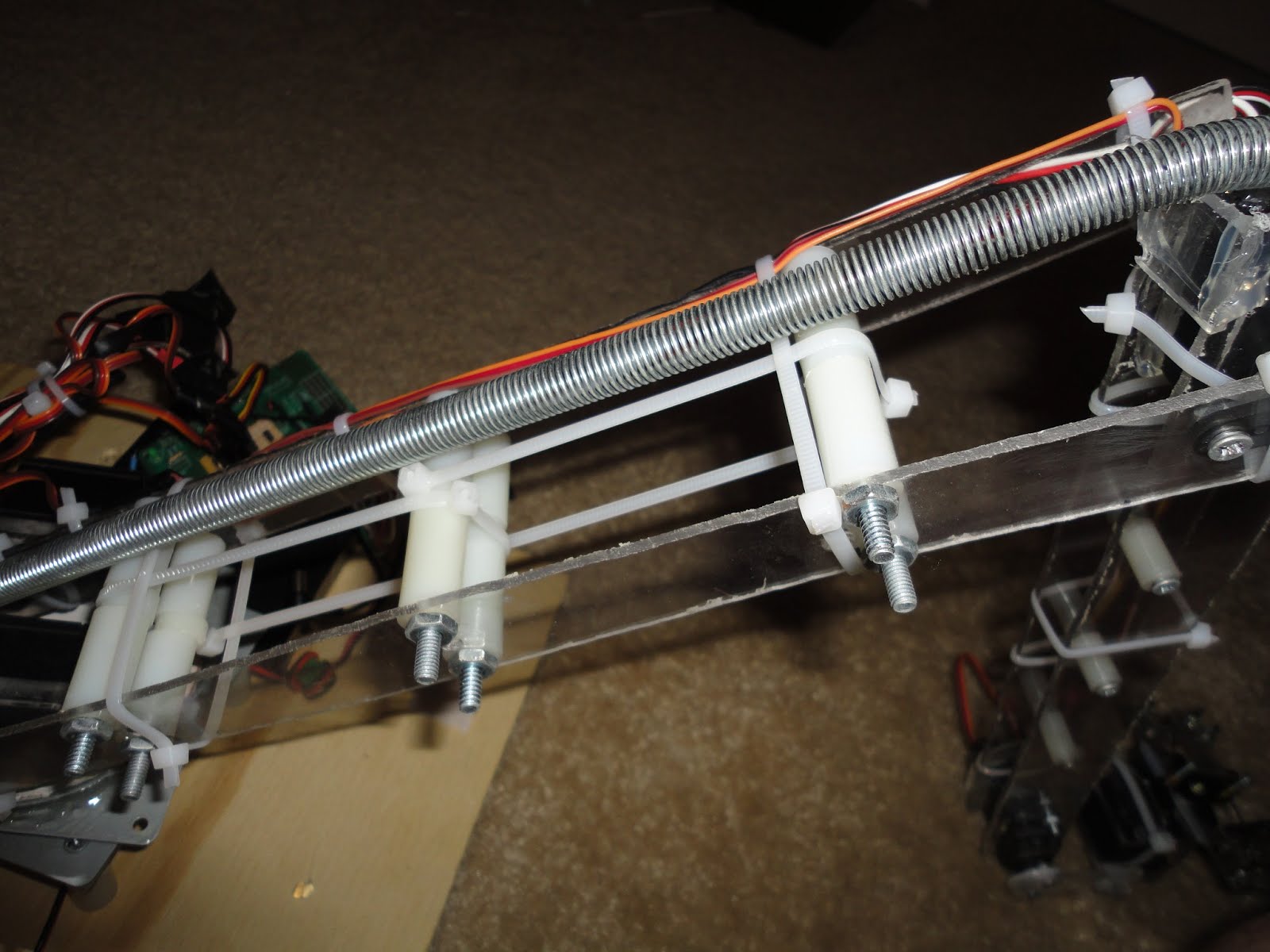
The base joint servos were checked to make sure they both had the same range of motion. Because the base joint servos are connected together, if they are not perfectly aligned, they will work against each other, using a lot of power and heating up. In order to prevent misaligned servos from fighting each other, the mounting holes on the Lexan arm were made wider so the screws attached to the servo arms can move slightly. The base arm was then moved to a 45 degree angle relative to the ground, where it will be around for most of the competition. The screws that attach the Lexan arm to the servo arm were secured when the arm was in this orientation. A spring was used on the back of the arm to further relieve stress on the base and elbow servos.

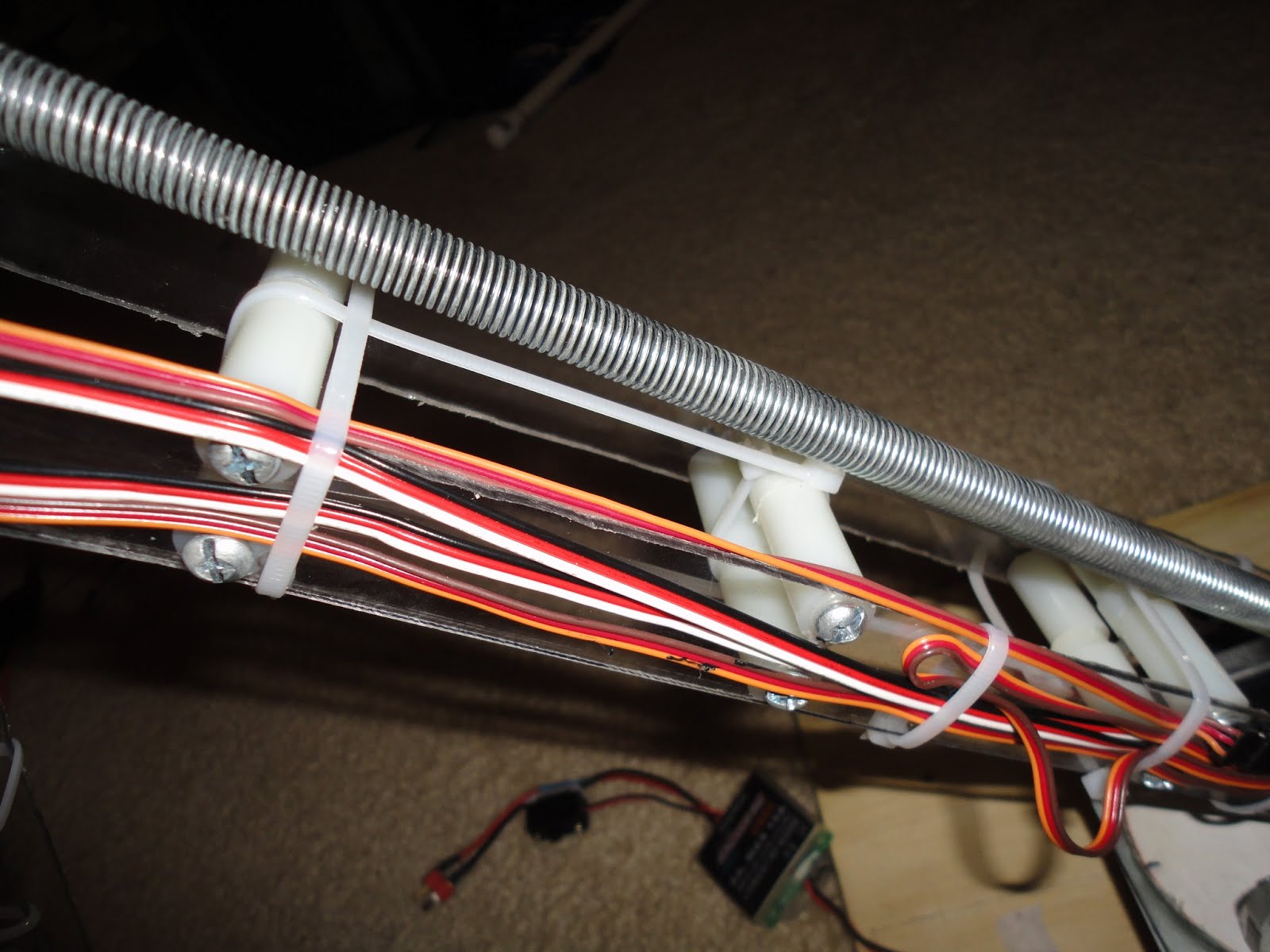
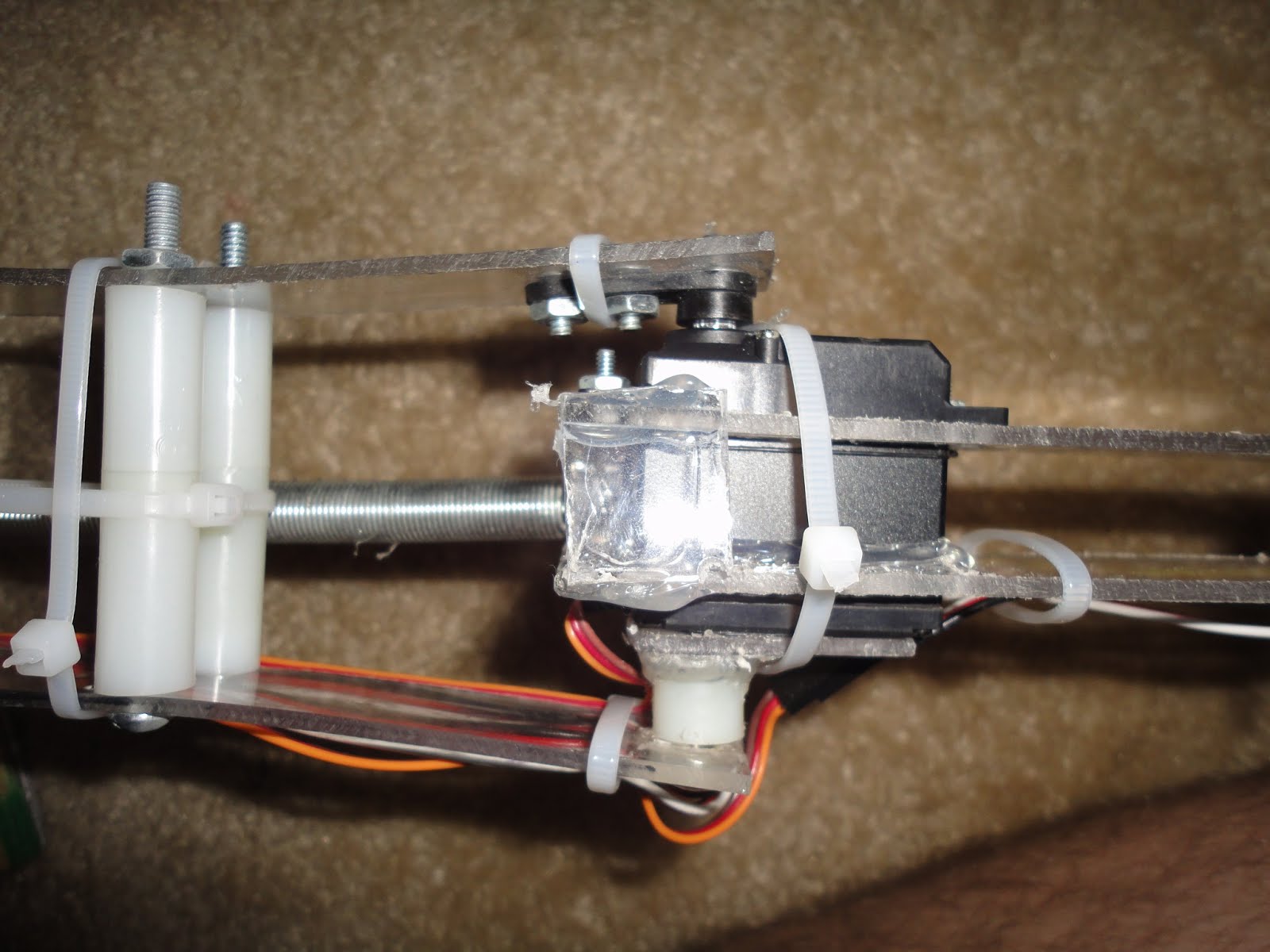
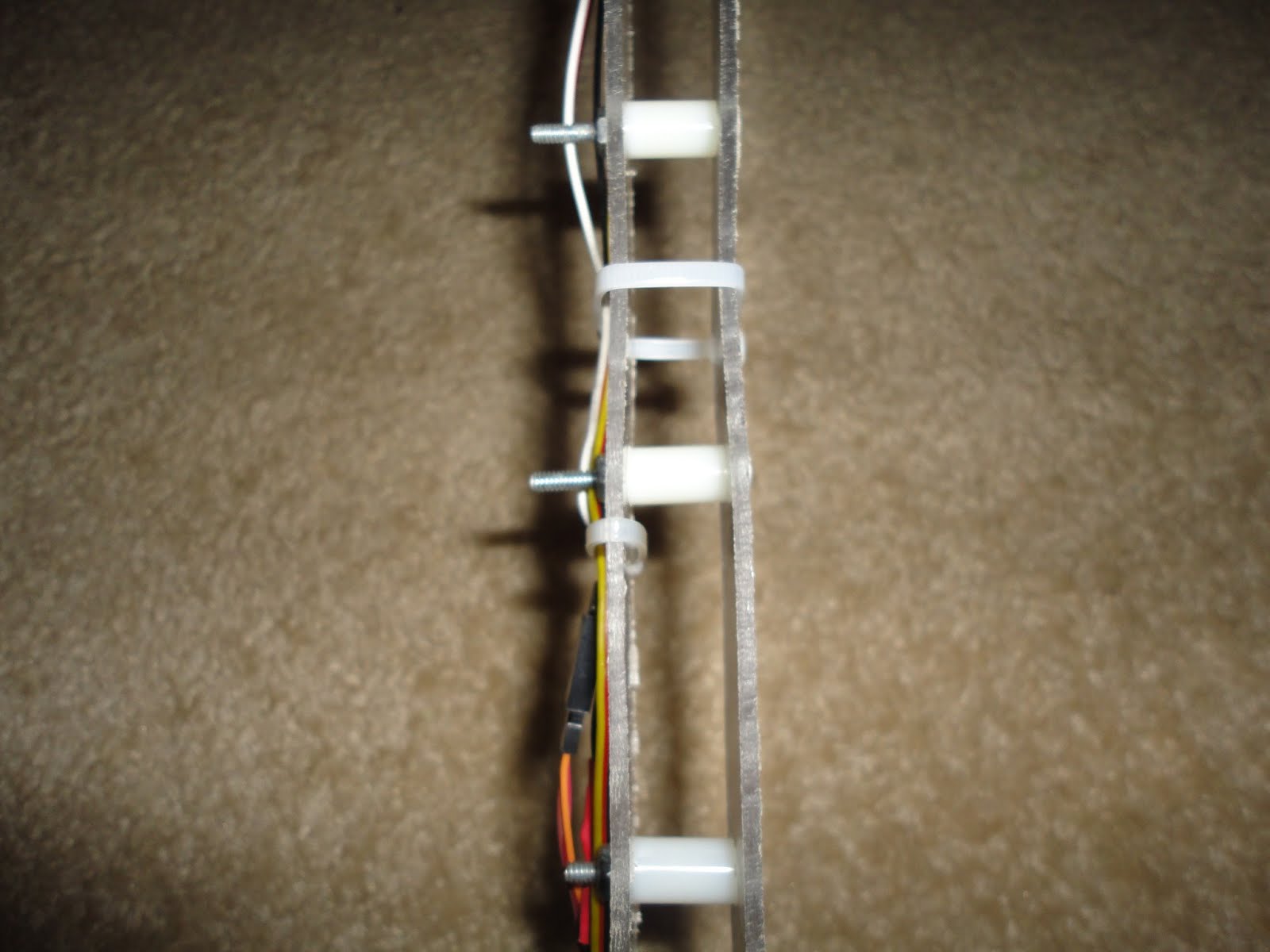
In order to prevent twisting of the lower part of the arm, six screws with nylon spacers and zip ties were used to secure the two arms to each other.
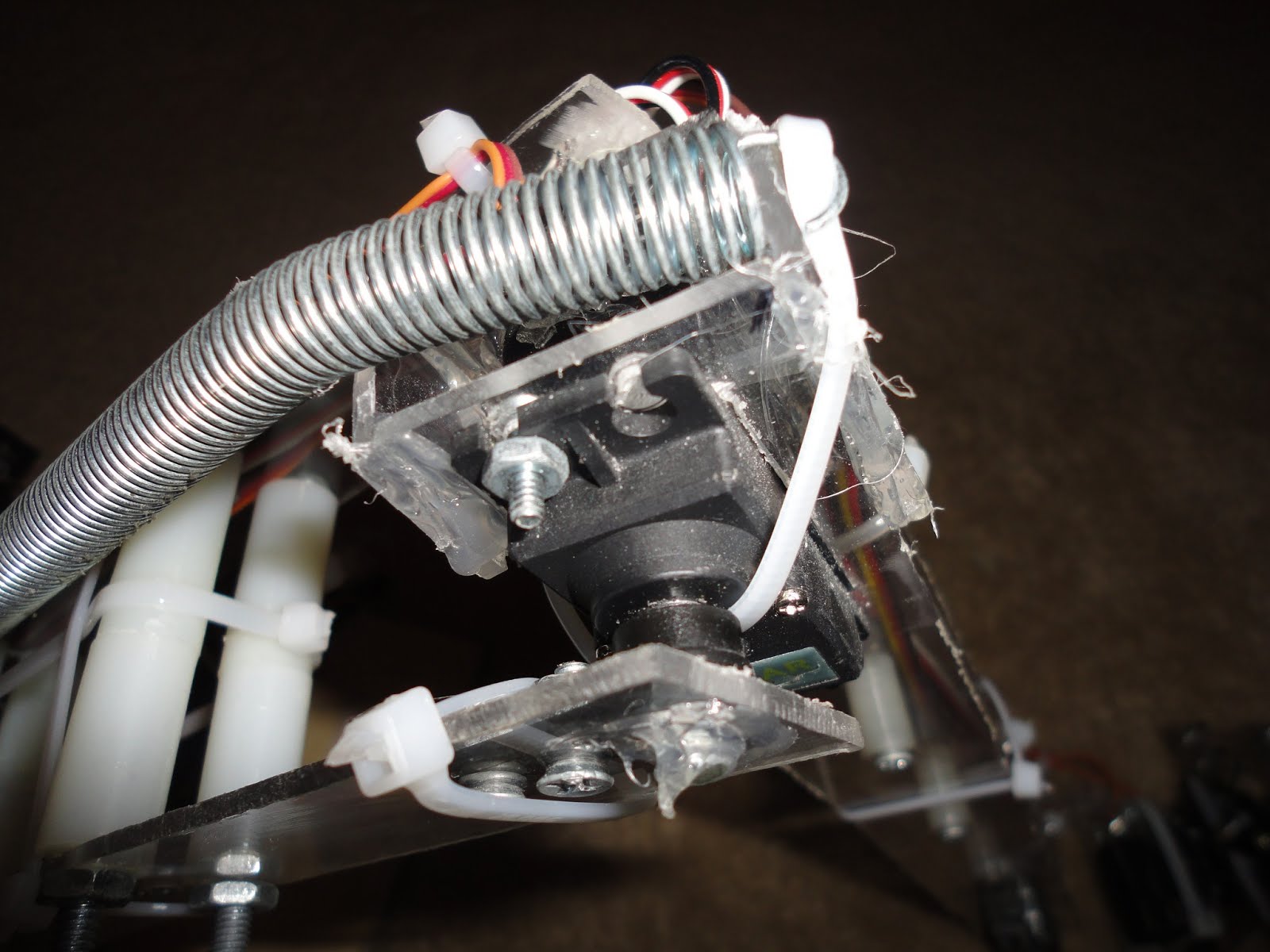

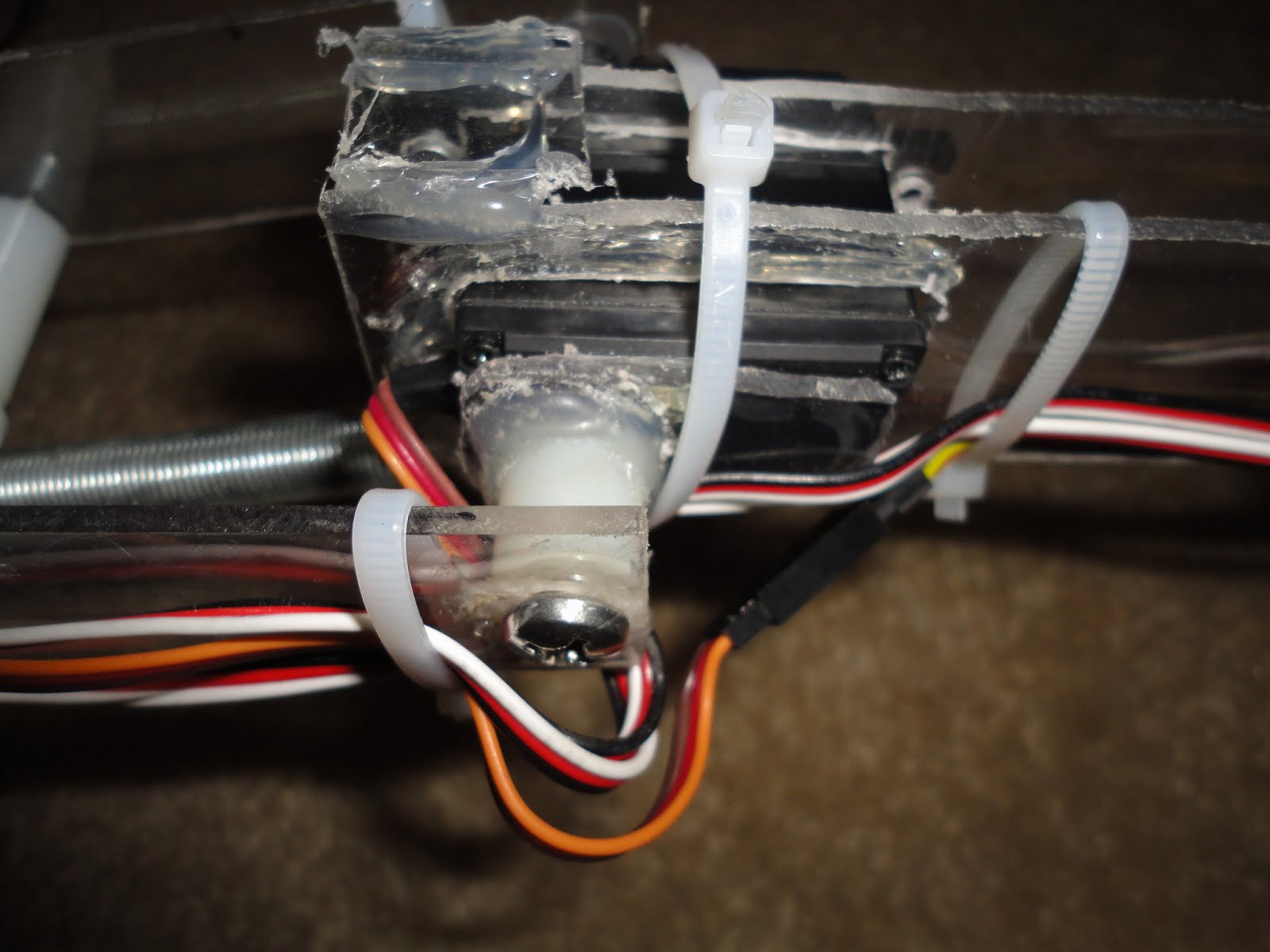
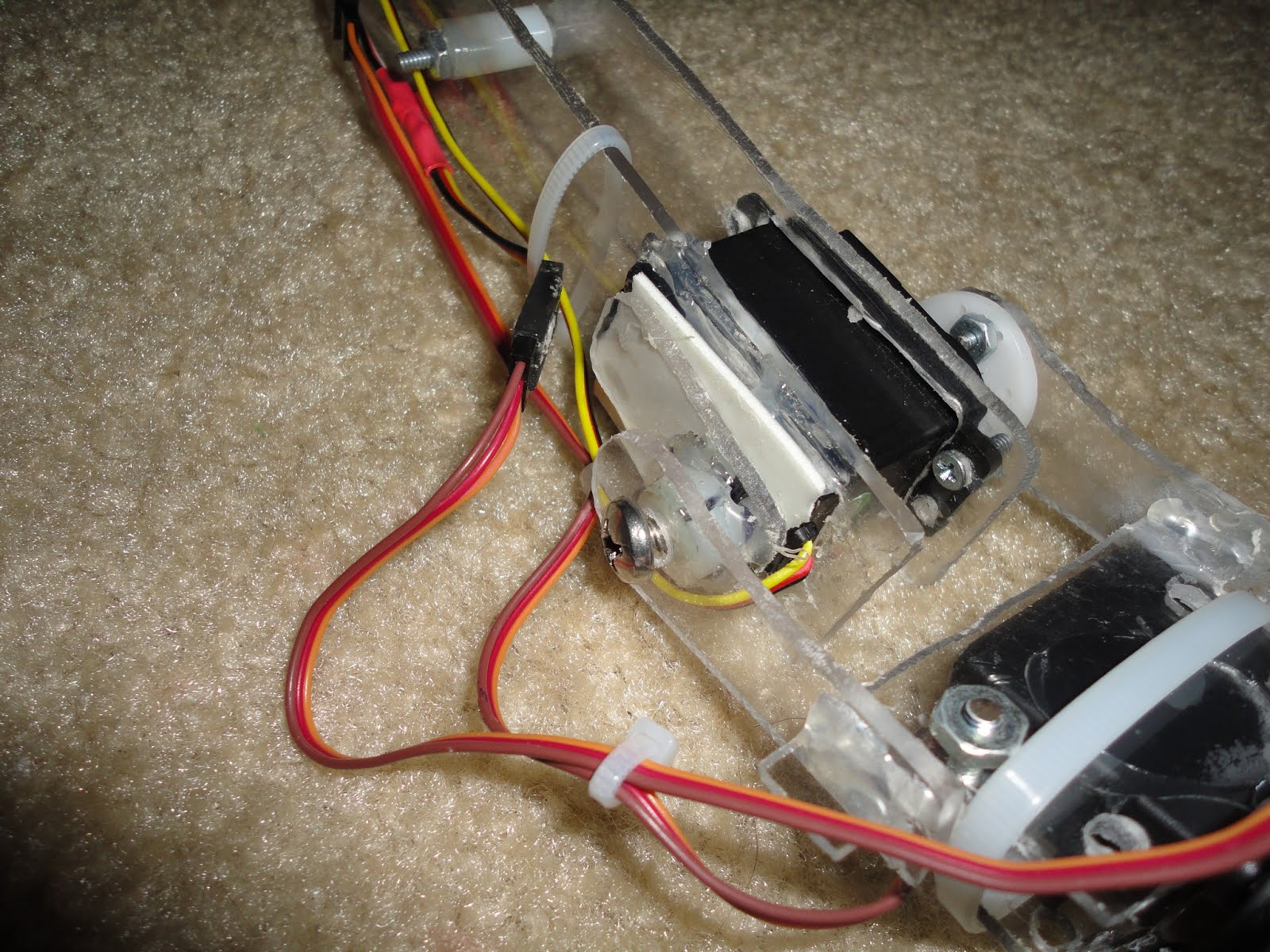
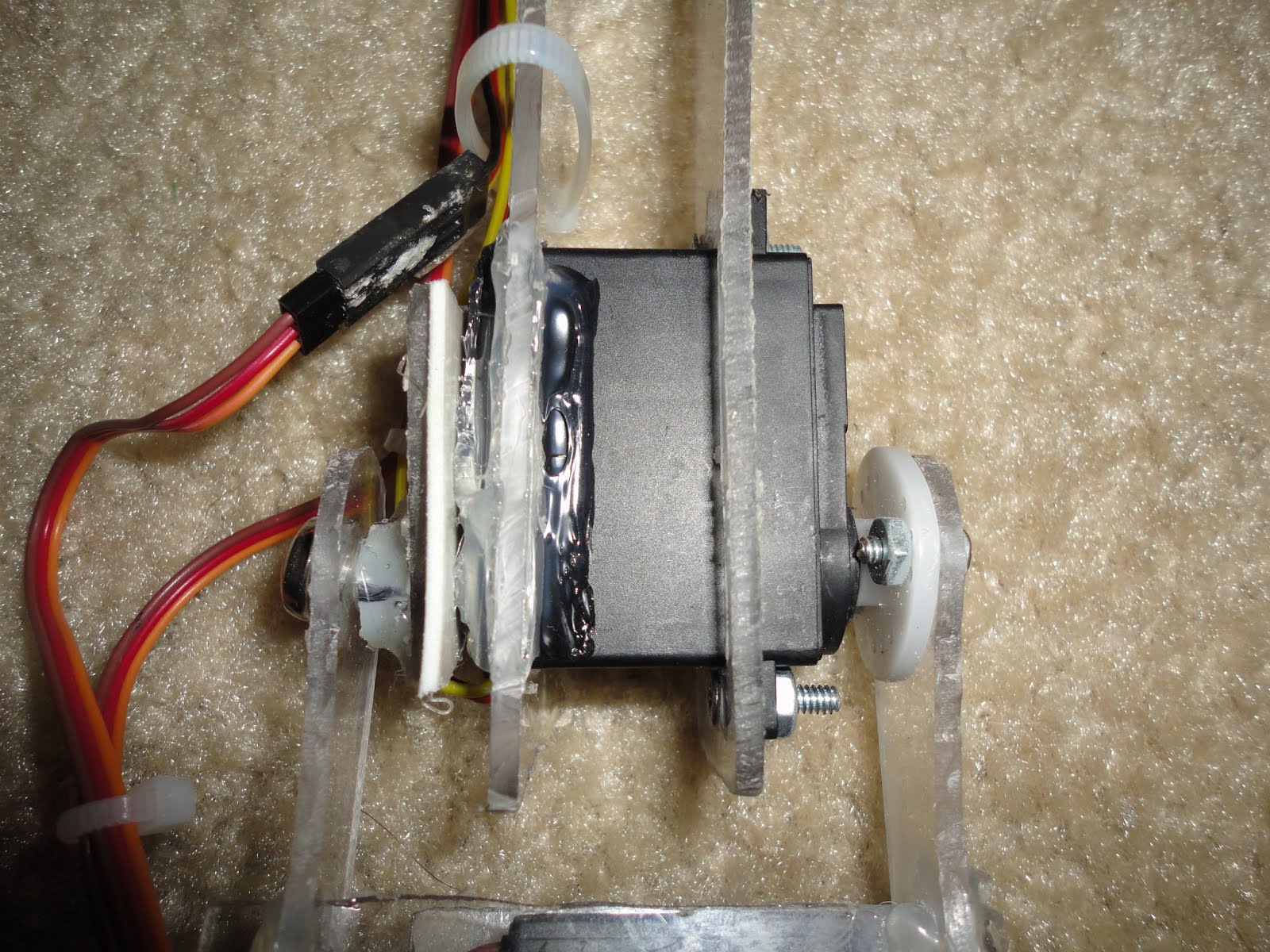
While the elbow joint servo was connected to the forearm on one side with its own arm, as shown above, the other side of the servo was connected to the forearm with a screw that was screwed into a nylon spacer, which was epoxied to a piece of Lexan which itself was glued to the servo with hot glue. This is shown in the next picture. This was also done on the wrist joint.

The wrist rotation servo was held in place by two pieces of Lexan which were attached to each other. The back of the gripper was attached to the rotation servo arm and the gripper servo was hot glued in place. The gripper design was based on an instructable available at here. However, the pictured gripper has two movable arms to make it easier to grasp objects.